H型電磁石がつくる磁場¶
H型電磁石が作る磁場の解析結果を以下に示す.
問題設定 / メッシュ¶
座標系として軸対称の円筒座標系を考える.計算平面は x-z座標とする.
H型の鉄芯を考える.磁極半径は 0.670 (m) とし、鉄芯の各部寸法は適宜与えるものとする.
H型鉄芯のコイルスロット部にコイルを設定する.コイル電流としては、1.76 (MAT) を与えるものとする.
計算領域は、磁極モデルに加えて厚さ 2.0 (m) の空気層を追加した領域を対象とする.
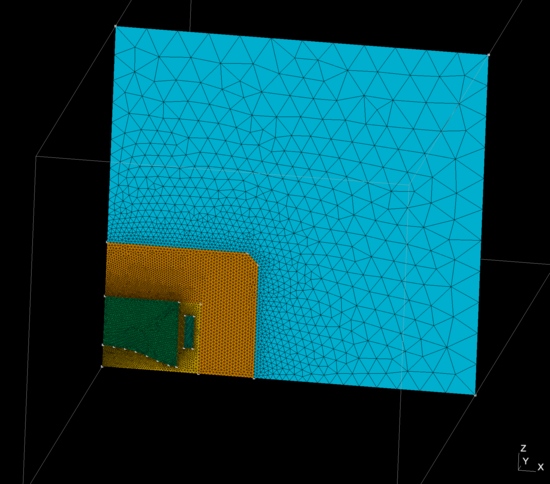
H型電磁石のメッシュ生成 プログラム¶
メッシュ生成用プログラムを以下に示す.
1import os, sys
2import numpy as np
3import gmsh_api.gmsh as gmsh
4import nkUtilities.load__constants as lcn
5import nkGmshRoutines.generate__polygon as ply
6
7# ------------------------------------------------- #
8# --- [1] initialization of the gmsh --- #
9# ------------------------------------------------- #
10gmsh.initialize()
11gmsh.option.setNumber( "General.Terminal", 1 )
12gmsh.option.setNumber( "Mesh.Algorithm" , 6 )
13gmsh.option.setNumber( "Mesh.Algorithm3D", 1 )
14gmsh.model.add( "model" )
15
16# ------------------------------------------------- #
17# --- [2] initialize settings --- #
18# ------------------------------------------------- #
19ptsDim , lineDim , surfDim , voluDim = 0, 1, 2, 3
20pts , line , surf , volu = {}, {}, {}, {}
21ptsPhys, linePhys, surfPhys, voluPhys = {}, {}, {}, {}
22x_, y_, z_, lc_, tag_ = 0, 1, 2, 3, 4
23
24
25# ------------------------------------------------- #
26# --- [3] Parameter Settings --- #
27# ------------------------------------------------- #
28
29tolerance = 1.e-5
30const = lcn.load__constants( inpFile ="dat/magnet.conf" )
31mesh_conf = lcn.load__constants( inpFile ="dat/mesh.conf" )
32
33lc1 = mesh_conf["volu1_mesh"]
34lc4 = mesh_conf["volu4_mesh"]
35lc5 = mesh_conf["volu5_mesh"]
36lc6 = mesh_conf["volu6_mesh"]
37lc7 = mesh_conf["volu7_mesh"]
38lc8 = mesh_conf["volu8_mesh"]
39
40z_slotDepth = const["z_medianPlane"] + const["z_airGap1"] + const["z_coilWidth"] + const["z_airGap2"]
41
42rPole1 = const["r_poleRadius"]
43zPole1 = const["z_medianPlane"]
44zPole3 = const["z_poleGapMax"]
45zPole4 = z_slotDepth
46
47rBuff1 = const["r_poleRadius"]
48rBuff2 = const["r_poleRadius"] + const["r_airGap1"]
49zBuff1 = const["z_medianPlane"]
50zBuff2 = z_slotDepth
51
52rCoil1 = const["r_poleRadius"] + const["r_airGap1"]
53rCoil2 = const["r_poleRadius"] + const["r_airGap1"] + const["r_coilWidth"]
54rCoil3 = const["r_poleRadius"] + const["r_airGap1"] + const["r_coilWidth"] + const["r_airGap2"]
55zCoil1 = const["z_medianPlane"]
56zCoil2 = const["z_medianPlane"] + const["z_airGap1"]
57zCoil3 = const["z_medianPlane"] + const["z_airGap1"] + const["z_coilWidth"]
58zCoil4 = const["z_medianPlane"] + const["z_airGap1"] + const["z_coilWidth"] + const["z_airGap2"]
59
60rYoke1 = const["r_poleRadius"] + const["r_airGap1"] + const["r_coilWidth"] + const["r_airGap2"]
61rYoke2 = rYoke1 + const["r_yokeWidth"] - const["r_yokeCorner"]
62rYoke3 = rYoke1 + const["r_yokeWidth"]
63zYoke1 = const["z_medianPlane"]
64zYoke2 = z_slotDepth
65zYoke3 = z_slotDepth + const["z_yokeWidth"] - const["z_yokeCorner"]
66zYoke4 = z_slotDepth + const["z_yokeWidth"]
67
68rAir1 = rYoke1 + const["r_yokeWidth"] - const["r_yokeCorner"]
69rAir2 = rYoke1 + const["r_yokeWidth"]
70rAir3 = rYoke1 + const["r_yokeWidth"] + const["r_outAirWidth"]
71zAir1 = const["z_medianPlane"]
72zAir2 = z_slotDepth + const["z_yokeWidth"] - const["z_yokeCorner"]
73zAir3 = z_slotDepth + const["z_yokeWidth"]
74zAir4 = z_slotDepth + const["z_yokeWidth"] + const["z_outAirWidth"]
75
76zRegen = const["z_regenCeil"]
77zPeeler = const["z_peelerBottom"]
78
79
80# ------------------------------------------------- #
81# --- [4] Modeling pole --- #
82# ------------------------------------------------- #
83
84inpFile = "dat/pole_cs.dat"
85with open( inpFile, "r" ) as f:
86 rData = np.loadtxt( f )
87
88pole_vertex = np.zeros( (rData.shape[0]+2,3) )
89pole_vertex[:-2,:] = rData
90pole_vertex[ -2,:] = [ rPole1, 0.0, zYoke2 ]
91pole_vertex[ -1,:] = [ 0.0, 0.0, zYoke2 ]
92
93ret1 = ply.generate__polygon( lc=lc1, vertex=pole_vertex )
94
95
96# ------------------------------------------------- #
97# --- [5] Modeling yoke --- #
98# ------------------------------------------------- #
99
100xY1 = [ 0.0, 0.0, zYoke2 ]
101xY2 = [ rPole1, 0.0, zYoke2 ]
102xY3 = [ rYoke1, 0.0, zYoke2 ]
103xY4 = [ rYoke1, 0.0, zYoke1 ]
104xY5 = [ rYoke3, 0.0, zYoke1 ]
105xY6 = [ rYoke3, 0.0, zYoke3 ]
106xY7 = [ rYoke2, 0.0, zYoke4 ]
107xY8 = [ 0.0, 0.0, zYoke4 ]
108yoke_vertex = np.array( [ xY1, xY2, xY3, xY4, xY5, xY6, xY7, xY8 ] )
109
110ret2 = ply.generate__polygon( lc=lc6, vertex=yoke_vertex )
111
112
113# ------------------------------------------------- #
114# --- [6] coil Modeling --- #
115# ------------------------------------------------- #
116
117xc1 = [ rCoil1, 0.0, zCoil2 ]
118xc2 = [ rCoil2, 0.0, zCoil2 ]
119xc3 = [ rCoil2, 0.0, zCoil3 ]
120xc4 = [ rCoil1, 0.0, zCoil3 ]
121coil_vertex = np.array( [ xc1, xc2, xc3, xc4 ] )
122
123ret3 = ply.generate__polygon( lc=lc5, vertex=coil_vertex )
124
125
126# ------------------------------------------------- #
127# --- [7] simulation region --- #
128# ------------------------------------------------- #
129
130xS1 = [ 0.0, 0.0, 0.0, lc1, 0 ] # lc1 should be used
131xS2 = [ rAir3, 0.0, 0.0, lc7, 0 ]
132xS3 = [ rAir3, 0.0, zAir4, lc7, 0 ]
133xS4 = [ 0.0, 0.0, zAir4, lc7, 0 ]
134simu_vertex = np.array( [ xS1, xS2, xS3, xS4 ] )
135
136ret4 = ply.generate__polygon( lc=lc7, vertex=simu_vertex )
137
138
139# ------------------------------------------------- #
140# --- [8] remove Duplicates / physNum Grouping --- #
141# ------------------------------------------------- #
142# -- [8-1] remove Duplicates -- #
143gmsh.model.occ.removeAllDuplicates()
144
145# -- [8-2] physical Grouping -- #
146
147pntFile = "dat/physNumTable.conf"
148import nkGmshRoutines.load__physNumTable as pnt
149ret = pnt.load__physNumTable( inpFile =pntFile , line =line , surf =surf, volu=volu, \
150 linePhys=linePhys, surfPhys=surfPhys, voluPhys=voluPhys )
151
152# ------------------------------------------------- #
153# --- [9] post process --- #
154# ------------------------------------------------- #
155gmsh.model.occ.synchronize()
156gmsh.model.mesh.generate(2)
157# gmsh.option.setNumber( "Mesh.BdfFieldFormat", 0 )
158# gmsh.option.setNumber( "Mesh.SaveElementTagType", 2 )
159# gmsh.write( "msh/model.bdf" )
160gmsh.write( "msh/model.geo_unrolled" )
161gmsh.write( "msh/model.msh" )
162gmsh.finalize()
163
164
165
166
167
168# Data = np.zeros( (nData,5) )
169# Data[:,0:3] = rData
170# Data[:, 3] = lc1
171# Data[:, 4] = 0
172
173# polekeys = []
174# for ik in range( nData ):
175# key = "pole_{0:06}".format( ik )
176# pts[key] = [ Data[ik,x_], Data[ik,y_], Data[ik,z_], Data[ik,lc_], Data[ik,tag_] ]
177# pts[key][tag_] = gmsh.model.occ.addPoint( pts[key][x_], pts[key][y_], pts[key][z_], \
178# meshSize=pts[key][lc_] )
179# polekeys.append( key )
180# pts["poleRoot1"] = [ Data[ 0,x_], Data[ 0,y_], zYoke2, lc1, 0 ]
181# pts["poleRoot2"] = [ Data[-1,x_], Data[-1,y_], zYoke2, lc1, 0 ]
182# for key in ["poleRoot2","poleRoot1"]:
183# pts[key][tag_] = gmsh.model.occ.addPoint( pts[key][x_], pts[key][y_], pts[key][z_], \
184# meshSize=pts[key][lc_] )
185# polekeys.append( key )
186
187# lineLoop = []
188# keys_1 = np.roll( np.array( polekeys ), 0 )
189# keys_2 = np.roll( np.array( polekeys ), -1 )
190# for ik in range( keys_1.shape[0] ):
191# linekey = "line_{0}".format( ik )
192# line[linekey] = gmsh.model.occ.addLine( pts[keys_1[ik]][tag_], pts[keys_2[ik]][tag_] )
193# lineLoop.append( line[linekey] )
194
195# # -- [2-3] generate surfaces -- #
196# lineGroup = gmsh.model.occ.addCurveLoop( lineLoop )
197# surf["quad"] = gmsh.model.occ.addPlaneSurface( [ lineGroup ] )
198
199
200# pts["xSim_1"] = [ 0.0, 0.0, 0.0, lc1, 0 ]
201# pts["xSim_2"] = [ rAir3, 0.0, 0.0, lc7, 0 ]
202# pts["xSim_3"] = [ rAir3, 0.0, zAir4, lc7, 0 ]
203# pts["xSim_4"] = [ 0.0, 0.0, zAir4, lc7, 0 ]
204# for ik in [ i+1 for i in range(4) ]:
205# key = "xSim_{0}".format(ik)
206# pts[key][tag_] = gmsh.model.occ.addPoint( pts[key][x_], pts[key][y_], pts[key][z_], \
207# meshSize=pts[key][lc_] )
208
209# lineLoop = []
210# for ik1,ik2 in [ (1,2), (2,3), (3,4), (4,1) ]:
211# ptkey1, ptkey2 = "xSim_{0}".format(ik1), "xSim_{0}".format(ik2)
212# linekey = "xSim_line_{0}_{1}".format(ik1,ik2)
213# line[linekey] = gmsh.model.occ.addLine( pts[ptkey1][tag_], pts[ptkey2][tag_] )
214# lineLoop.append( line[linekey] )
215
216# lineGroup = gmsh.model.occ.addCurveLoop( lineLoop )
217# surf["simu"] = gmsh.model.occ.addPlaneSurface( [ lineGroup ] )
218
219
220# ------------------------------------------------- #
221# --- [6] Physical Grouping --- #
222# ------------------------------------------------- #
223
224# gmsh.model.occ.synchronize()
225# voluPhys["poleGap"] = gmsh.model.addPhysicalGroup( voluDim, [ volu["poleGap"] ] , tag=301 )
226# voluPhys["poleTip"] = gmsh.model.addPhysicalGroup( voluDim, [ volu["poleTip"] ] , tag=302 )
227# voluPhys["poleBody"] = gmsh.model.addPhysicalGroup( voluDim, [ volu["poleBody"] ], tag=303 )
228# voluPhys["coilAirGap"] = gmsh.model.addPhysicalGroup( voluDim, [ volu["airGap_inn"], volu["airGap_bot"], \
229# volu["airGap_out"], volu["airGap_upr"] ], tag=304 )
230# voluPhys["coil"] = gmsh.model.addPhysicalGroup( voluDim, [ volu["coil"] ] , tag=305 )
231# voluPhys["yoke"] = gmsh.model.addPhysicalGroup( voluDim, [ volu["yoke1"], volu["yoke2"], volu["yoke3"] ], tag=306 )
232# voluPhys["outsideAir"] = gmsh.model.addPhysicalGroup( voluDim, [ volu["air1"], volu["air2"] ], tag=307 )
233
H型電磁石の磁場解析用 Elmer入力ファイル¶
以下にElmer入力ファイルのサンプルを示す.
1! ========================================================= !
2! === Hshaped Magnet in axi-symmetric 2D case === !
3! ========================================================= !
4
5! ------------------------------------------------- !
6! --- [1] Global Simulation Settings --- !
7! ------------------------------------------------- !
8
9CHECK KEYWORDS "Warn"
10
11Header
12 Mesh DB "." "model"
13 Include Path ""
14 Results Directory ""
15End
16
17Simulation
18 coordinate system = "Axi symmetric"
19 Coordinate Mapping(3) = 1 3 2
20
21 Simulation Type = "Steady State"
22 Steady State Max Iterations = 1
23
24 Solver Input File = "Hshape_magnet.sif"
25 Output File = "Hshape_magnet.dat"
26 Post File = "Hshape_magnet.vtu"
27End
28
29Constants
30 Permeability of Vacuum = 1.2566e-06
31End
32
33! ------------------------------------------------- !
34! --- [2] Body & Material Settings --- !
35! ------------------------------------------------- !
36
37Body 1
38 Target Bodies(1) = 201
39 Name = "core"
40
41 Equation = 1
42 Material = 1
43End
44
45
46Body 2
47 Target Bodies(1) = 202
48 Name = "coil"
49
50 Equation = 1
51 Material = 2
52 Body Force = 1
53End
54
55Body 3
56 Target Bodies(2) = 203 204
57 Name = "Air"
58
59 Equation = 1
60 Material = 3
61End
62
63
64Material 1
65 Name = "Iron"
66 Electric Conductivity = 1.0e7
67 Relative Permittivity = 1.0
68 Relative Permeability = 5000.0
69
70 H-B Curve(38,2) = Real
71 INCLUDE dat/HBcurve.dat
72End
73
74Material 2
75 Name = "Cupper"
76 Electric Conductivity = 5.95e7
77 Relative Permittivity = 1.0
78 Relative Permeability = 1.0
79End
80
81Material 3
82 Name = "Air"
83 Electric Conductivity = 0.0
84 Relative Permittivity = 1.0
85 Relative Permeability = 1.0
86End
87
88
89! ------------------------------------------------- !
90! --- [3] Equation & Solver Settings --- !
91! ------------------------------------------------- !
92
93Equation 1
94 Name = "MagneticField"
95 Active Solvers(2) = 1 2 3
96End
97
98
99Solver 1
100 Equation = "MgDyn2D"
101 Procedure = "MagnetoDynamics2D" "MagnetoDynamics2D"
102 Variable = String "AV"
103
104 Linear System Solver = "Iterative"
105 Linear System Iterative Method = "BiCGStab"
106 Linear System Max Iterations = 3000
107 Linear System Convergence Tolerance = 1.0e-7
108 Linear System Preconditioning = None
109 Linear System Symmetric = True
110
111 Steady State Convergence Tolerance = 1.0e-6
112 Nonlinear System Convergence Tolerance = 1.0e-8
113 Nonlinear System Max Iterations = 100
114 Nonlinear System Newton After Iterations = 3
115 Nonlinear System Newton After Tolerance = 1.0e-8
116 Nonlinear System Relaxation Factor = 0.5
117
118End
119
120
121Solver 2
122 Exec Solver = "After Simulation"
123 Equation = "MGDynamicsCalc"
124 Procedure = "MagnetoDynamics" "MagnetoDynamicsCalcFields"
125 Potential Variable = String "AV"
126
127 Calculate Current Density = Logical True
128 Calculate Magnetic Field Strength = Logical False
129
130 Linear System Solver = "Iterative"
131 Linear System Preconditioning = None
132 Linear System Residual Output = 0
133 Linear System Max Iterations = 5000
134 Linear System Iterative Method = "BiCGStab"
135 Linear System Convergence Tolerance = 1.0e-8
136 Linear System Symmetric = True
137End
138
139Solver 3
140 Exec Solver = "After Simulation"
141 Equation = "SaveAlongLine"
142 Procedure = "SaveData" "SaveLine"
143 FileName = "dat/bfield_xAxis.dat"
144 Polyline Coordinates(2,3) = 0.0 0.0 0.0 0.8 0.0 0.0
145 Polyline Divisions(1) = 100
146End
147
148! ------------------------------------------------- !
149! --- [4] Body Forces / Initial Conditions --- !
150! ------------------------------------------------- !
151
152Body Force 1
153! -- Give the driving external potential -- !
154 Current Density = Real 7.33e+07
155End
156
157
158! ------------------------------------------------- !
159! --- [5] Boundary Conditions --- !
160! ------------------------------------------------- !
161
162Boundary Condition 1
163 Name = "Far Boundary"
164 Target Boundaries(1) = 103
165 ! Infinity BC = Logical True
166 AV {e} = 0.0
167End
168
169Boundary Condition 2
170 Name = "z=0 Boundary"
171 Target Boundaries(1) = 101
172 AV {e} 1 = 0.0
173 AV {e} 2 = 0.0
174End
H型電磁石の入力ファイルの要点は以下である.
軸対称計算であることを、 ( "Axi Symmetric" ) にて記載. 今回は、x-z平面を使用するので、 Coordinate Mapping は 1 3 2 として指定する.
Body 2 (コイル) に体積力を定義. Body Force 1 には、面を通り抜ける(2次元なので)、電流密度を与える.
Material 1 (コア) に、H-B Curveにより H-B 曲線をデータとして与えている.
2次元磁場計算用の関数 ( "MagnetoDynamics2D" "MagnetoDynamics2D" ) を使用する.
データ保存用に ( "SaveData" "SaveLine" ) を呼び出す( シミュレーション終了前に実行 ). + polyCoordinates(2,3) で、ある地点からある地点までの直線を定義 + polyLine Divisions(1) で、内分する点数を指定.( Model Manual は、要素数が2となっており誤っている.1個で十分. )
無限境界条件が使用可能.
z=0の境界条件は,
 なので、x方向、及び、y方向の
なので、x方向、及び、y方向の  の勾配を0として設定.
の勾配を0として設定.
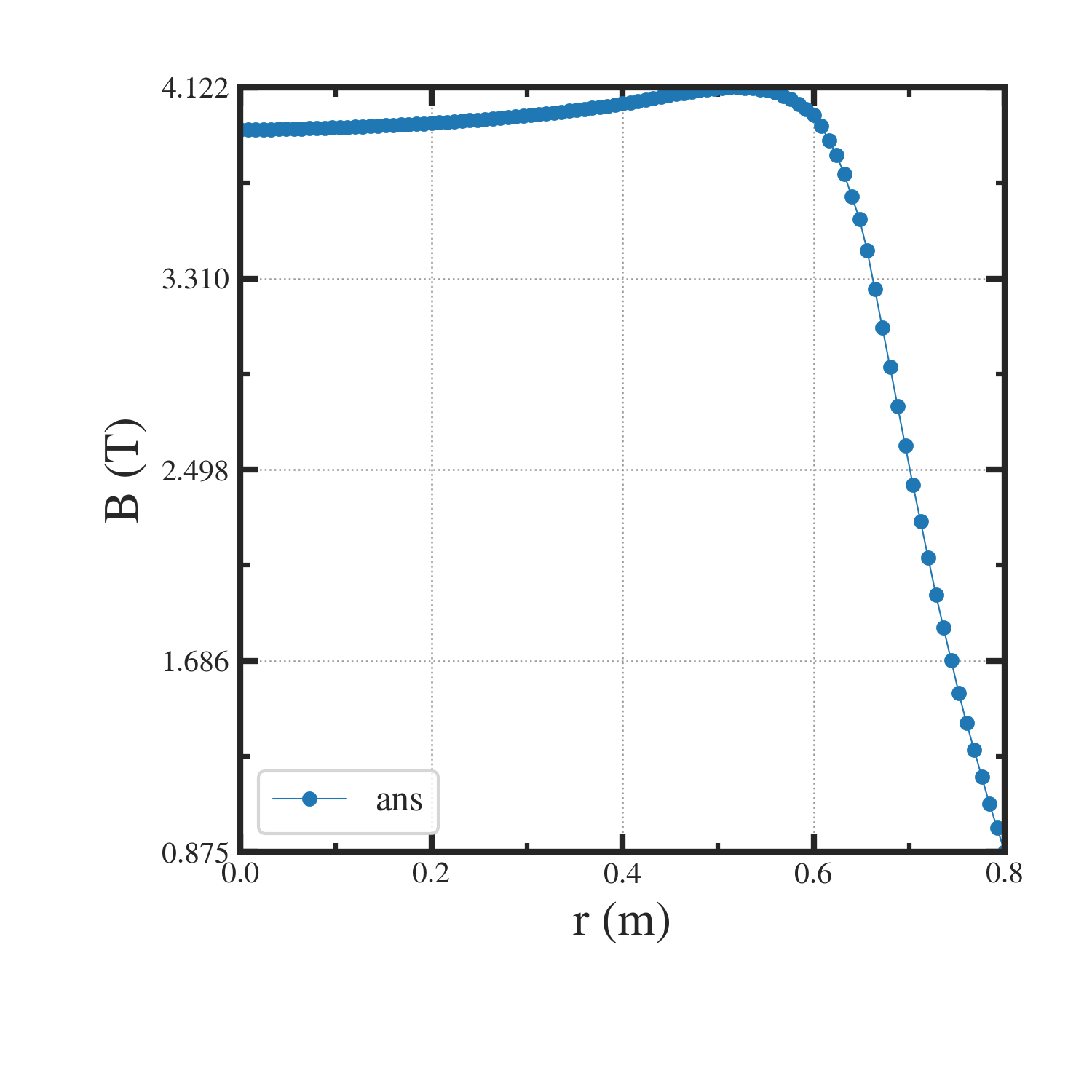
磁場解析結果¶
解析実行結果は以下に示す.以下に磁束線及び磁場強度の2次元マップと磁場のr依存性を示す.
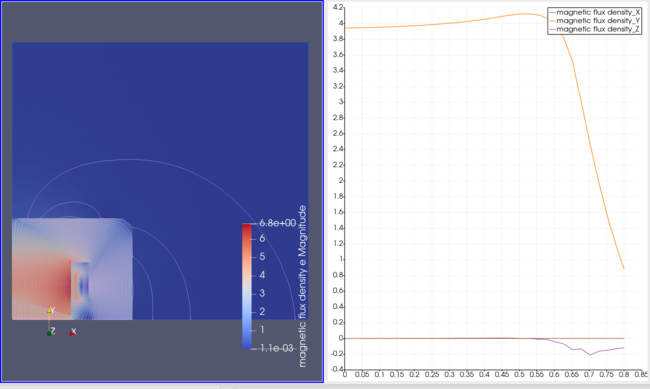
H 型電磁石の磁場強度は約 4 (T) であり、意図した程度の磁場強度が出力されている.
また、Elmer内部で内挿された磁場の軸方向成分を次に示す. paraviewにおけるプロットと一致している.
SaveLine を使用する際の注意点としては、あくまで、内部情報は線形内挿によって得られている点 ( 高精度ではない )と、Elmer からの出力時には、PolyLine として定義した線分に則ってデータが格納されてない点である.前者はそういう仕様なので我慢するしかなく(もしくは自作)、後者の問題はデータ出力後、プロット前にソートする必要がある.単純に、
index = np.argsort( xAxis )
xAxis = xAxis[index]
yAxis = yAxis[index]
でよい.