画像処理の座標系について¶
アフィン変換について¶
画像処理の最も基本的変換は、 アフィン変換(Affine Conversion) である.
アフィン変換は、 平行移動、拡大縮小、回転、剪断 の4要素からなる線形変換である.
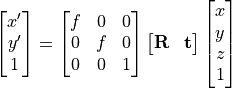
デカルト座標系に対して、拡大縮小、回転、剪断の3変換は、線形変換
 にて記述が可能.
にて記述が可能.平行移動については、定数項の和で記載が可能.
座標系をそのまま用いた場合の画像変換の、各変形は以下である.
平行移動 : 定数項の加減算 (
 )
)拡大縮小 : 対角行列倍 (
 )
)回転 : 回転行列倍 (
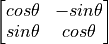 )
)剪断 : シア行列倍 (
 )
)
同次座標系について¶
N次元の座標系を1次元拡張したN+1次元の座標系に変換し、これに対して線形変換することで、N次元空間での平行移動が記述可能である.
この際に使用する N+1次元の座標空間を 同次座標系 と呼ぶ.
同次座標系は、例えば、[x,y,z]に対して、1次元座標空間を追加した [x,y,z,w] などとして記載されるが、w の値としては何を用いてもよい.よって、w=1とした [x,y,z,1]を同次座標系として用いることが通例である.
平行移動について¶
平行移動は例えば、次のように記述できる.
剛体変換について¶
剛体変換は、回転、及び、平行移動からなる座標変換である.
剛体変換は変換前後で体積が保存する.
拡大縮小や剪断を含まないアフィン変換である.
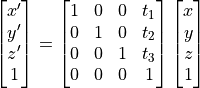
剛体変換は、同次座標系を用いて、以下のように記述できる.
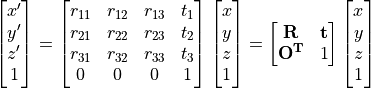
透視投影カメラモデルについて¶
カメラを用いて、透視投影して3次元物体を2次元画像へ写像した際の変換を以下に記す.
同次座標系の利点¶
平行移動を線形変換として取り扱える(演算子を単一化することが可能).
個別の変換(直感的でわかりやすい)を、合成変換としてまとめることができ、数値上・コード上わかりやすい.
合成変換の固有値分解などにより、結局の変換の "本質" が解析可能.
位置制御や画像処理の分野で標準的に使用されており、議論しやすい.
References¶
CVMLエキスパートガイド - 同次座標系 ( https://cvml-expertguide.net/terms/cv/homogeneous-coordinates/ )
CVMLエキスパートガイド - アフィン変換 ( https://cvml-expertguide.net/2021/06/28/affine-transformation/ )
CVMLエキスパートガイド - カメラモデル ( https://cvml-expertguide.net/terms/cv/camera-geometry/camera-model/ )